Cara mengaktifkan koneksi internet dengan menggunakan modem lte ke Fortigate 51E
Peralatan
Fortigate 51E
Modem Lte (disini saya menggunakan Huawei 4G LTE Usb Stick type E3372h-607)
Kabel usb to serial untuk akses Console Fortigate
Kabel UTP untuk mengakses GUI Fortigate dari web browser
Cara mengakses Fortigate bisa dengan menggunaan 2 cara
Dengan CLI
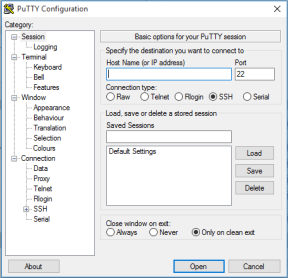
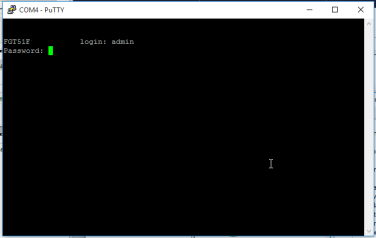
Koneksikan kabel usb serial dari usb laptop ke port console Fortigate, dan buka Putty untuk akses cli Fortigate
Dengan GUI web browser
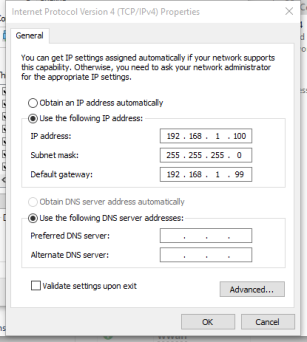
Koneksikan kabel Ethernet laptop dengan port 1-5 Fortigate. Dan seting IP pada laptop / Komputer dengan IP 192.168.1.100/24,
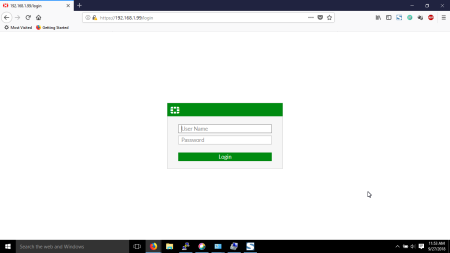
Secara Default IP pada Fortigate adalah 192.168.1.99. Buka browser dan akses ke https://192.168.1.99 . untuk mengakses GUI Fortigate
Isi Username dengan admin dan password biarkan kosong / tanpa password, setelah itu Login
CARA SETING MODEM LTE pada Fortigate
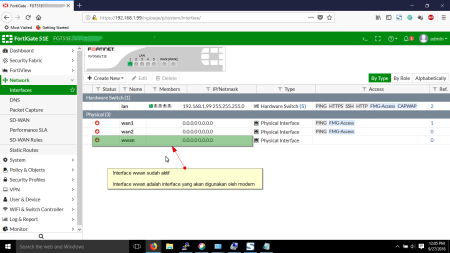
Pada Fortigate secara default interface wwan akan di hide atau didisable
untuk mengaktifkan lte-modem
ketikkan perintah berikut ke putty
config system lte-modem
set status enable
end
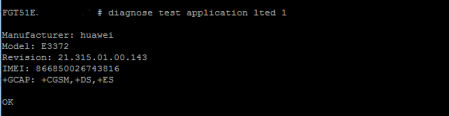
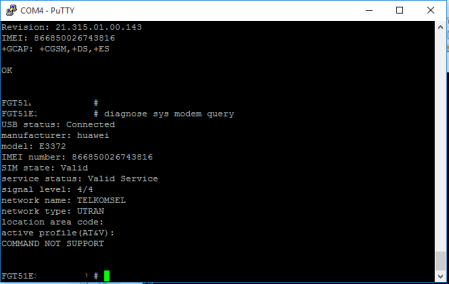
setelah modem dikoneksikan ke usb Fortigate, untuk test modem apakah sudah terkoneksi dan terdeteksi
diagnose test application lted 1 atau
diagnose sys modem query
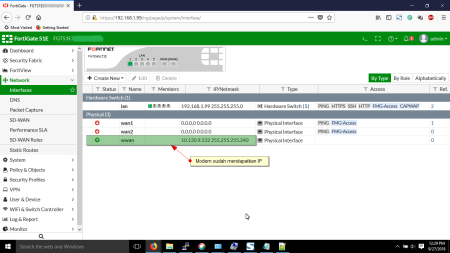
setelah modem sudah terdeteksi dan terkoneksi tetapi tidak mendapatkan IP,
dapat dicoba untuk menambahkan setingan apn dan extra-init
set apn internet
set extra-init at+cgdcont=1,”IP”,”internet”
set modem-port 0
setelah itu coba untuk refresh modem dengan perintah cli sebagai berikut
diagnose test application lted 9
dan tungggu sampai beberapa saat,
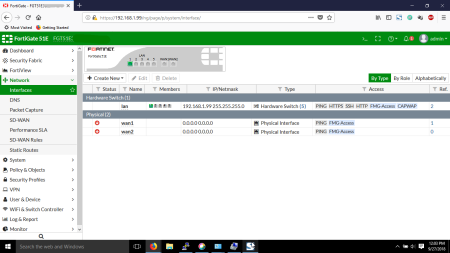
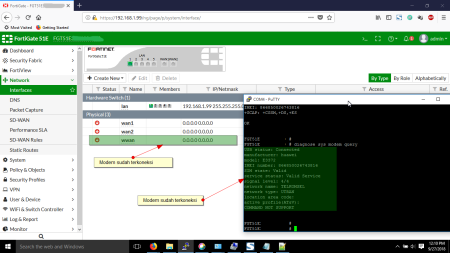
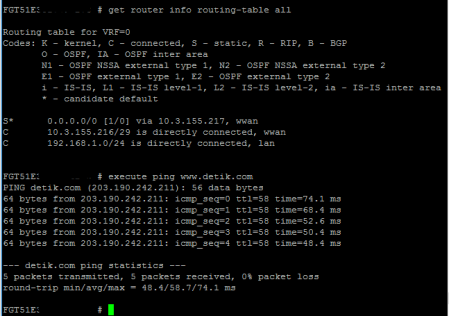
Test kembali untuk koneksi modem dengan cara ketik command seperti pada step 2 setelah modem terdeteksi check di GUI Network -> Interface dan Interface wwan.
Jika belum juga mendapatkan IP bisa dicoba dengan cara mencabut dan menancapkan kembali modem dari fortigate, atau dengan cara terakhir dapat dicoba dengan merestart Fortigate
27 april 2012 pada hari ini kami mengikuti lomba robot untuk kedua kalinya, setelah dari IRO, lomba yang kami ikuti kali ini merupakan lomba line follower yang diadakan oleh salah satu universitas dijakarta utara.lomba kali ini kami ikuti dari 4 team yang terdiri dari XA2R alpha, XA2R beta, XA2R charlie, XA2R delta. Setelah melalui seleksi ketat dan kerja keras yang menghasilkan keringat kami sangat-sangat bersyukur pada kesempatan kali ini kami bisa memperoleh 2 peringkat pada perlombaan ini (#macamraportanajaadaperingkat). sebenernya bingung lagi mau cerita apa lagi yang jelas kami sangat bersyukur kepadamu ya Allah atas penghargaan yang kami peroleh hari ini.
modul sensor untuk line follower yang terdiri dari 8 sensor dan 2 buah ic comparator dan 8 indikator keluaran dari sensor, dan desain PCB standar industri dengan bahan 2 layer FR4 dan plated through hole (PTH) yang didesain untuk pembelajaran robot line follower….
modul mikon untuk keluarga avr 40 pin seperti ATmega 8535, ATmega 16, yang dilengkapi dengan pin isp downloader, tombol reset, xtall 4Mhz, Desain PCB standar industri dengan bahan 2 layer FR4 dan plated through hole (PTH).
Driver motor ini merupakan driver H-Bridge yang didisain untuk menghasilkan drive dua arah dengan arus kontinu hingga 2 A pada tegangan 4,8 Volt sampai 46 Volt. Modul ini dapat men-drive beban-beban induktif seperti misalnya motor DC. dan dilengkapi dengan indikator disetiap output motornya.
Fitur:
– Terdiri dari 2 driver full H-Bridge yang dapat diparalel.
– Tiap driver mampu melewatkan arus kontinu 2 A,serta mendukung tegangan beban dari 4,8 V sampai 46 V.
– Input kompatibel dengan level tegangan TTL dan CMOS.
– Jalur catu daya input (logika) terpisah dari jalur catu daya untuk beban.
– Desain PCB standar industri dengan bahan 2 layer FR4 dan plated through hole (PTH).
– mendukung sistem mikrokontroler.
modul ini merupakan modul untuk pembelajaran PID, bisa dipakai untuk aplikasi PID pada line follower, Wall Follower. modul ini dilengkapi dengan LCD 16×2, bahan PCB FR04 standard pabrik, 4 buah switch untuk memilih menu pada robot..
harga : Rp 1000000
batere, downloader dan charger dijual terpisah
downloader bisa menggunakan produk downloader isp
CMPS03 merupakan sensor arah(kompas digital), sensor jenis ini biasa digunakan untuk menentukan arah dari mata angin dengan range 0-255 data, disini saya menggunakannya untuk meluruskan jalan robot dengan menggunakan compas ini.
disini saya menggunakan:
1. mikrokontroler ATmega 128
2. motor, roda, dan base berbentuk BELT
3. cmps03
4. LCD
5. dan beberapa rangkaian pendukung lainnya.
Tahun ini merupakan tahun ke empat bagi team robot gunadarma(CERC) untuk ikut ajang KRCI dan KRI, cuma untuk tahun ini divisi KRCI dan BATTLE saja yang diikuti, sedangkan KRI diikuti oleh PS MURO, tahun ini kerja keras kita memang belum membuahkan hasil maksimal, tetapi Alhamdulillah ada peningkatan dalam berbagai hal, mulai dari algoritma, rangkaian, dan kesolidan. Meskipun hasil yang didapat Divisi berkaki hanya masuk peringkat 4, BATTLE peringkat 8, dan BERODA hmmmm CACAD diarena tapi bisa jalan bagus di kandang, mungkin belun rejekinya untuk bisa bertarung di Nasional tahun ini, ya bersyukur masih bisa memberikan yang terbaik yang kami bisa, semoga untuk tahun depan adik-kita dapat memperoleh yang lebih baik, dan dapat bertarung lebih sempurna lagi untuk tahun depan, sehingga team ini masih bisa mengikuti event-event selanjutnya, bisa hadir dengan terobosan-terobosan baru. ya ini doa kakak-kakak yang seharusnya udah lulus, tapi gk lulus-lulus hwakakakaka(walah kok jadi curhat) ..





























































 nett :Rp
nett :Rp 






















































